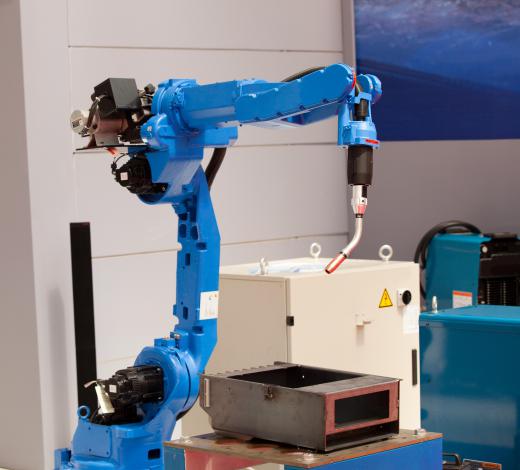
Assembly robots are computer-controlled, automated, programmable machines used in manufacturing and other industrial settings. These robots carry out assigned tasks based on movement routes programmed into a computer. Typically, these robots appear to be no more than a robotic arm or set of arms that perform functions such as welding, cutting, picking, or materials placement along an assembly line. Manufacturing environments involving overly repetitive tasks, hazardous materials, or unsafe conditions are the ideal environments for assembly robots.
Initially, computerized machines in industry first appeared in the 1970s with very limited mobility. Industrial robots, the larger category of robotics to which assembly robots now belong, need at least two axes to articulate along any straight line. Two axes allow a robot to move back and forth along a straight line, or up and down along a straight line. While some industrial settings can use machines with such limited mobility, most assembly lines and other manufacturing set ups need much more mobility and versatility.

As robotic technology developed from the 1970s to present, the International Organization for Standardization (ISO) published standards for the definition of industrial robots. Dubbed multipurpose manipulators by the ISO, assembly robots and other industrial robots must meet ISO criteria. The primary criteria for assembly or other manufacturing robots is the use of three or more axes on which the robot articulates. Using three axes, industrial robots have the ability to manipulate any number of materials and perform any number of movements required to assemble products.
Three axes allow assembly robots to articulate, not only along a straight line, but through space anywhere within reach of the robotic arm. More advanced assembly or manufacturing robots have the required three axes, as well as three additional axes to control yaw, pitch, and roll. In other words, not only can advanced robots reach any point in space within their reach, but can do so from any angle.

To the untrained eye, such axes appear on robotic arms as similar to a shoulder, elbow, and wrist. In terms of function, that is exactly how assembly robots perform, using axes for flexibility and increased dexterity. The more a robotic arm or other form of robot can move, the more finite tasks the robot is able to successfully navigate.
A robotic arm on a minimum of three axes is not the only criteria for industrial robots, as assembly robots must also include all peripherals needed for the robot to function. Such peripherals include computer controls and software interfaces, as well as additional hardware components. Collectively, all components needed in the operation of assembly robots are called work cells. Numerous work cells are used in manufacturing environments, with each cell repeating preassigned tasks.